
使用过boost::asio的同学都知道,asio中的steady_timer是一个较为简陋的组件,其可以提供一个异步等待超时的机制,并且其异步等待是一次性的。这就意味着你想要一个和闹钟一样的定时器,每隔固定时间就滴答一次是需要做不少额外的工作。这篇文章带大家使用boost::asio中的steady_timer实现一个RepeatedTimer。
1. boost::asio中的steady_timer
如果我们想做一次超时的定时器,使用steady_timer写如下代码即可:
asio::io_service io_service;
asio::steady_timer {io_service};
steady_timer.expires_from_now(std::chrono::milliseconds(5 * 1000));
steady_timer.async_wait([](const asio::error_code &e) {
if (e.value() == 0) {
std::cout << "Time is up!" << std::endl;
}
});
io_service.run();
上述代码将输出:
qingw > Time is up!
可以看出其在5s之后将输出一行文字,随后程序结束。
上述代码问题比较明显:
(1) 无法持续不断的进行超时回调,就是每个5s都调一次回调。
(2) 无法进行续租约式的对timer进行续租。就是说在5s超时时间还没到的时候按下reset()按钮,timer就重新开始计时。
为了解决这个问题,提供一个便利高效易用的timer给用户,我们可以对其进行如下封装,实现一个RepeatedTimer。
2. 实现一个现代化的RepeatedTimer
首先说一下我们对这个类期望的使用方式应该是这样的。
asio::io_service io_service;
asio::io_service::work work {io_service}; // work是为了io_service在没有pending task的时候不退出
std::thread th { io_service.run(); };
RepeatedTimer timer(io_service, [](const asio::error_code &e) { std::cout << "Time is up!"; });
timer.Start(/*ms=*/1000);
timer.Stop();
timer.Reset(/*ms=*/2000);
2.1 一把梭实现
根据前面总结的几点需求,我们可以直观地进行如下实现。
class RepeatedTimer final {
public:
RepeatedTimer(asio::io_service &io_service,
std::function<void(const asio::error_code &e)> timeout_handler)
: io_service_(io_service), timer_(io_service_),
timeout_handler_(std::move(timeout_handler)) {}
void Start(const uint64_t timeout_ms) { Reset(timeout_ms); }
void Stop() { is_running_ = false; }
void Reset(const uint64_t timeout_ms) {
is_running_ = true;
DoSetExpired(timeout_ms);
}
private:
void DoSetExpired(const uint64_t timeout_ms) {
if (!is_running_) { return; }
timer_.expires_from_now(std::chrono::milliseconds(timeout_ms));
timer_.async_wait([this, timeout_ms](const asio::error_code &e) {
if (e.value() == asio::error::operation_aborted || !is_running_) { return; }
timeout_handler_(e);
this->DoSetExpired(timeout_ms);
});
}
private:
// The io service that runs this timer.
asio::io_service &io_service_;
// The actual boost timer.
asio::steady_timer timer_;
bool is_running_ = false;
// The handler that will be triggered once the time's up.
std::function<void(const asio::error_code &e)> timeout_handler_;
};
测试代码:
// 准备工作
asio::io_service io_service;
asio::io_service::work work {io_service};
io_service.run();
std::thread th{ io_service.run(); };
// 使用RepeatedTimer
RepeatedTimer timer(io_service, []() { std::cout << "Time is up!" << std::endl; });
timer.Start(/*ms=*/1000);
std::this_thread::sleep_for(std::chrono::millisecond(3 * 1000));
timer.Stop();
timer.Reset(/*ms=*/2000);
上述测试代码将会先每隔1s输出一个Time is up!,一共输出3个(也可能是2个, 看具体时间消耗),以后每隔2s输出一句。
/// 每隔1s输出一句
qingw > Time is up!
qingw > Time is up!
qingw > Time is up!
/// 后面的都是每隔2s输出一行
qingw > Time is up!
qingw > Time is up!
...
2.2 线程安全
上述实现的RepeatedTimer并不是一个线程安全的,因为我们自己定义了一些状态来做判断,因此,要想实现一个线程安全的,我们还需要做一些工作。 在这里我选择使用读写锁来作为多线程状态的保护。
class RepeatedTimer final {
public:
RepeatedTimer(asio::io_service &io_service,
std::function<void(const asio::error_code &e)> timeout_handler)
: io_service_(io_service), timer_(io_service_),
timeout_handler_(std::move(timeout_handler)) {}
void Start(const uint64_t timeout_ms) { Reset(timeout_ms); }
void Stop() {
std::unique_lock<std::shared_mutex> guard {shared_mutex_};
is_running_ = false;
}
void Reset(const uint64_t timeout_ms) {
{
std::unique_lock<std::shared_mutex> guard {shared_mutex_};
is_running_ = true;
}
DoSetExpired(timeout_ms);
}
private:
void DoSetExpired(const uint64_t timeout_ms) {
{
std::shared_lock<std::shared_mutex> guard {shared_mutex_};
if (!is_running_) { return; }
}
timer_.expires_from_now(std::chrono::milliseconds(timeout_ms));
timer_.async_wait([this, timeout_ms](const asio::error_code &e) {
if (e.value() == asio::error::operation_aborted) {
return;
}
{
std::shared_lock<std::shared_mutex> guard {shared_mutex_};
if (!is_running_) {
return;
}
timeout_handler_(e);
}
// 这一步放到锁范围之外,避免递归上锁
this->DoSetExpired(timeout_ms);
});
}
private:
// The io service that runs this timer.
asio::io_service &io_service_;
// The actual boost timer.
asio::steady_timer timer_;
std::shared_mutex shared_mutex_;
bool is_running_ = false;
// The handler that will be triggered once the time's up.
std::function<void(const asio::error_code &e)> timeout_handler_;
};
上述改进的实现版本能够确保在多线程下使用RepeatedTimer是安全的,因为我们将状态使用读写锁保护了起来。测试代码就不继续写了,也很简单,大家可以自己写一下。
2.3 死锁分析
上述实现虽然是线程安全的,而且我们一眼看过去,是没有死锁的可能的,因为使用的是一个读写锁,并且没有递归上锁。事实上这样的想法是正确的,只是我们在实现一个通用组件的时候,不能仅仅考虑组件本身,还应该考虑用户使用过程中的心智负担以及使用安全性问题。怎么理解这句话呢?其实很简单,说白了就是用户不管怎么用你这个组件,都不应该出现问题!
考虑用户在多线程环境中使用RepeatedTimer,他很容易地就会写出如下代码:
class MyClass {
public:
explicit MyClass(asio::io_service &io_service)
: timer_(io_service, [this](){ TimeoutHandler(); }) {
timer_.Start();
}
void TimeoutHandler() {
std::lock_guard<std::mutex> guard {mutex_};
state_.ChangeSth();
}
void F() {
std::lock_guard<std::mutex> guard {mutex_};
state_.ChangeSth();
timer_.Reset(1000);
}
private:
RepeatedTimer timer_;
// The mutex that protects state_.
std::mutex mutex_;
MyState state_;
};
我们简单的测试这段代码之后,会发现这段代码会有概率发生hang住的问题,使用pstack或者其他debug工具可以发现其发生死锁。
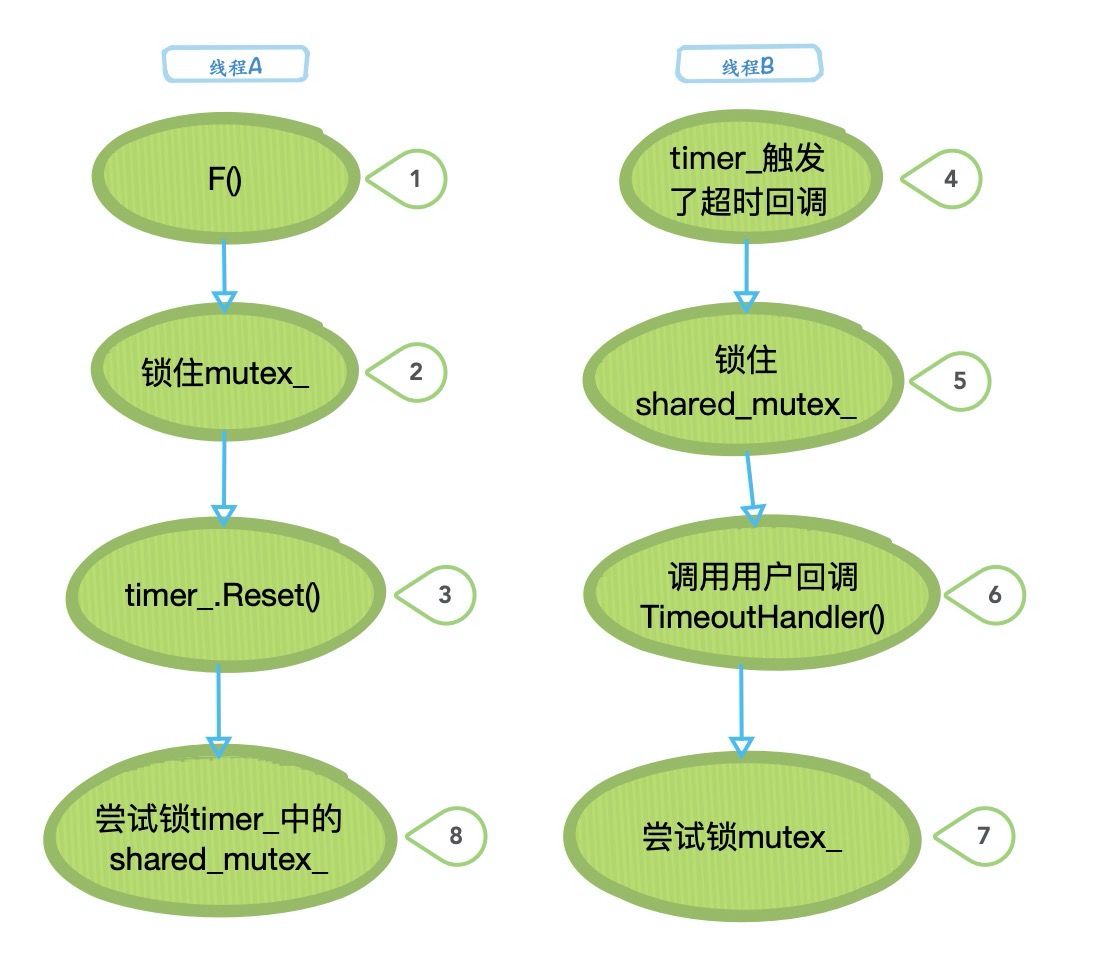 线程A, B分别按照时间顺序执行到第3, 第6步之后,紧接着A,B线程分别acquire shared_mutex_和mutex_,但这两者都被对方线程锁住,因此造成死锁。
线程A, B分别按照时间顺序执行到第3, 第6步之后,紧接着A,B线程分别acquire shared_mutex_和mutex_,但这两者都被对方线程锁住,因此造成死锁。
解决方法也很简单,就是不要在DoSetExpired()中shared_mutex_的锁范围内调用timeout_handler_(),shared_mutex_只作用于更改timer的状态即可。改进后的代码如下,只需要简单更改DoSetExpired()方法中的锁范围即可。
class RepeatedTimer final {
public:
/// 其他方法没有改变
private:
void DoSetExpired(const uint64_t timeout_ms) {
{
std::shared_lock<std::shared_mutex> guard {shared_mutex_};
if (!is_running_) { return; }
}
timer_.expires_from_now(std::chrono::milliseconds(timeout_ms));
timer_.async_wait([this, timeout_ms](const asio::error_code &e) {
if (e.value() == asio::error::operation_aborted) { return; }
{
// 注意,这里的锁范围缩小,只作用于更改自身的状态,timeout_handler_()在锁范围之外
std::shared_lock<std::shared_mutex> guard {shared_mutex_};
if (!is_running_) { return; }
}
timeout_handler_(e);
this->DoSetExpired(timeout_ms);
});
}
};
OK, 上述的实现就可以在多线程下安全地使用RepeatedTimer了,而且不论用户代码怎么写都不会和timer发生死锁。测试的代码就不继续写了,也很简单,大家可以自己写一下。其中用到的读写锁其实必要性不是非常大,因为读写锁还是针对于多读的场景,然而在RepeatedTimer中,只有DoSetExpired中才会是读状态,而DoSetExpired里读状态的地方,只有在极少数的情况下才会多读,比如线程A调用Reset()刚好执行到DoSetExpired最开始读状态的地方,线程B刚好是io_service进行超时回调刚到进入DoSetExpired中,这个时候才恰好是多读。所以这里到底是否需要使用读写锁,在没有做一些很深刻的性能测试之前,其实还只能是根据经验判断。但不管怎么样,都没什么大问题。
2.4 原子变量实现
用锁实现虽然能有效的解决多线程安全问题,但是在上述思考及实现过程中,还是有很多地方需要大家非常小心,才能避免掉进坑里。上述实现还有一个特点,就是我们其实只需要在多线程的情况下小心的保护is_running_这一个变量,而不是很多复杂的状态,因此,原子变量就是为这种场景而生的。
使用原子变量,RepeatedTimer的实现变得异常简单。
class RepeatedTimer final {
public:
RepeatedTimer(asio::io_service &io_service,
std::function<void(const asio::error_code &e)> timeout_handler)
: io_service_(io_service), timer_(io_service_),
timeout_handler_(std::move(timeout_handler)) {}
void Start(const uint64_t timeout_ms) { Reset(timeout_ms); }
void Stop() { is_running_.store(false); }
void Reset(const uint64_t timeout_ms) {
is_running_.store(true);
DoSetExpired(timeout_ms);
}
private:
void DoSetExpired(const uint64_t timeout_ms) {
if (!is_running_.load()) { return; }
timer_.expires_from_now(std::chrono::milliseconds(timeout_ms));
timer_.async_wait([this, timeout_ms](const asio::error_code &e) {
if (e.value() == asio::error::operation_aborted || !is_running_.load()) { return; }
timeout_handler_(e);
this->DoSetExpired(timeout_ms);
});
}
private:
// The io service that runs this timer.
asio::io_service &io_service_;
// The actual boost timer.
asio::steady_timer timer_;
std::atomic<bool> is_running_ = { false };
// The handler that will be triggered once the time's up.
std::function<void(const asio::error_code &e)> timeout_handler_;
};
搞定,上述的原子实现也非常简单,和最开始我们实现的版本并无逻辑区别,它保证了多线程场景下使用的安全性,并且性能还比加锁版本要好很多。
3. 总结与思考
(1) RepeatedTimer这样的类是一个非常有用且用途非常广泛的类。例如在常见的一些RAFT实现里,需要用到RepeatedTimer作为其ElectionTimer, VoteTimer及HeartbeatTimer等。这些tiemr都需要Reset()的续租能力,还有很多分布式系统中的一些心跳时间,续租时间等都可以使用这样的类。
(2) 这个类是一定需要考虑线程安全的问题。原因在于其基于asio的staedy_timer,这里的回调都是在io_service中完成,其大概率是在io_service的work pool中进行回调,然后用户的线程是一定会大量对其进行操作,因而没有什么单线程的使用场景。
(3) 使用锁的时候需要考虑的不仅仅是一个组件本身的死锁可能性,还需要尽可能避免同业务代码结合的时候的死锁问题。
(4) 原子变量使用的场景一般是对单状态的保护。 而锁的使用场景则是对很多复杂的状态的保护。因为这个时候我们即使对每个状态都使用原子变量,我们还需要考虑这些状态之间的协调性,这意味着很多状态之间是有状态互斥或者状态协同的。